仿真集成
GSD采用三位一体的构造方式,包括软件数字仿真系统、半实物实时仿真系统、物理动模系统三种形式。
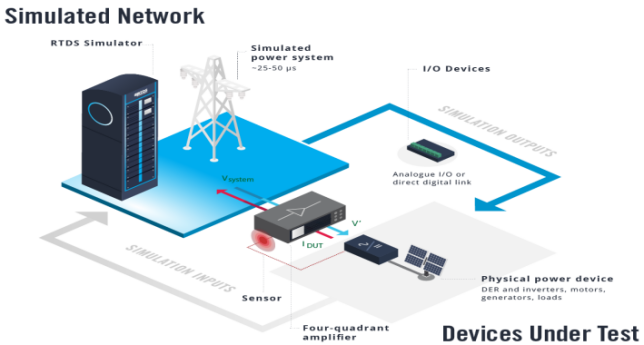
其中: 数字仿真系统是基于PC仿真软件的纯数字离线仿真;半实物仿真系统通过将主流的仿真机和控制器组成常规的HIL实时仿真系统或者将仿真机配合功率放大器与动模装置组成PHIL实时仿真系统;物理动模系统则是将多台动模设备进行组网运行,并配有SCADA系统进行协调调度。
您在这里:
仿真集成

Jerry Hill
Designer
Roger Jones
Manager
Bianca Oliver
Consultant
Mike Miller
Stylist
仿真集成
流行的半实物仿真机常规充当三种角色,仿真加速器,PHIL功率硬件在环,RCP快速控制原型,HIL硬件在环,其中后两种是最常用的。最流行的半实物平台主要有dSPACE, RTDS, RT-LAB等。其中dSPACE主要用于RCP,后两种常用语HIL。
SCADA
单台设备的被控对象模型采用开关模型或平均值模型(根据不同的仿真需求进行选择),控制系统模型与实际动模设备完全一致。控制系统的设计完全遵循MBD的工作流,验证通过的算法可以直接生成代码部署到实际设备种。
RCP
单台设备的被控对象模型采用开关模型或平均值模型(根据不同的仿真需求进行选择),控制系统模型与实际动模设备完全一致。控制系统的设计完全遵循MBD的工作流,验证通过的算法可以直接生成代码部署到实际设备种。